
Vincúlate a econexia
Sistema robotizado clasifica fresas y automatiza proceso de corte
 > Sistema robotizado clasifica fresas y automatiza proceso de corte
> Sistema robotizado clasifica fresas y automatiza proceso de corte
Por medio de la aplicación de robots y de técnicas de visión de máquinas se automatiza el proceso de corte de las hojas de la fruta –conocidas como cáliz– y se clasifican las fresas según su tamaño.
La idea nació a partir de un proyecto del curso de Robótica que dicta el profesor Pedro Cárdenas, del Departamento de Ingeniería Mecánica y Mecatrónica de la Universidad Nacional de Colombia (UNAL), en el que los estudiantes tenían la tarea de integrar los conocimientos adquiridos en el desarrollo de un sistema capaz de facilitarles a los productores la tarea de clasificar las fresas según las características más deseables para el mercado, como su tamaño.
Con la intención de ir un poco más allá de lo visto en clase, miembros del semillero de robótica MomentUN y estudiantes del curso se unieron para diseñar este sistema, en el que emplearon elementos como fichas de Lego Mindstorms, un robot Phantom X disponible en el Laboratorio de Mecatrónica de la Universidad, y una cámara USB.
“La idea era coger la fresa, cortarla, mirarla con un sistema de visión artificial y determinar sus características”, explica Jurgen Krejci Muñoz, estudiante de Ingeniería Mecatrónica y coordinador del semillero. Dicho sistema se implementó de la forma más realista posible y se obtuvo un resultado bastante satisfactorio.
En el proyecto también participaron los estudiantes Alejandro Marín, Sebastián Realpe, Camilo Suárez y Johan Marín, quienes se encargaron de las diferentes fases del sistema de clasificación, el cual se compone de una banda transportadora que lleva las fresas hasta el punto donde la cámara USB permite aplicar la visión de máquina, capturando la imagen de la fruta para analizar sus características físicas.
Por medio de algoritmos, la máquina se programa para determinar aspectos como el tamaño y el área donde, en el siguiente paso, se debe cortar el cáliz. Una vez procesada esta información la banda sigue corriendo y lleva la fruta para que pueda ser tomada por el robot, que la transporta hacia el área donde finalmente se le cortan las hojas.
Después de cortada la fresa, el robot la clasifica según su tamaño como pequeña, mediana o grande, poniéndola en cajas diferentes para cada denominación.
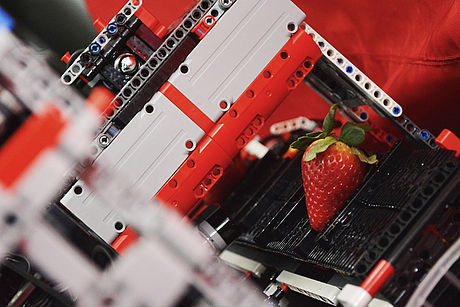
Con una cámara USB el sistema reconoce qué cortar, y características como el tamaño de la fresa.

Con una cámara USB el sistema reconoce qué cortar, y características como el tamaño de la fresa.
¿Cómo aprende a ver una máquina?
El estudiante Suárez realizó su aporte desde la aplicación de la visión de máquinas, la que, según explica, consiste en llevar a que el computador analice imágenes como lo haría una persona, pero aplicando algoritmos.
Al respecto, explica que “lo que hacemos es tratar de enseñarle al computador a que con base en un conjunto de datos pueda ver esa información e interpretarla como lo haríamos nosotros, e inferir cosas a partir de las imágenes; para este caso se hizo con video en tiempo real obtenido por la cámara USB”.
Para conseguirlos tuvieron que transformar la información de las imágenes obtenidas por la cámara, de un modelo de color RGB –similar al captado por los ojos– a uno HSV, que permite una mayor diferenciación de los colores en términos numéricos, lo que facilita que la máquina analice esta información e identifique las partes rojas y amarillas como la fresa y los diferentes tonos de verde, como las hojas que deben ser cortadas.
Esto también permite clasificar la fruta por su tamaño para el proyecto, además de poder, si se quisiera, seleccionar las fresas más rojas como las que pueden ser más apetecidas por los consumidores, un producto por el que se podría cobrar un precio mayor.
Automatizar el agro
Para el estudiante Krejci, este proyecto evidencia además las oportunidades que pueden representar la robótica y la automatización para brindarle soluciones al sector agropecuario, que en muchos lugares se sigue cosechando con métodos de hace 50 años.
Acercar estas problemáticas a los futuros profesionales también era uno de los objetivos de esta actividad. Para Laura Marcela Castillo, quien está haciendo la doble titulación en los programas de Ingeniería Agrícola e Ingeniería Mecatrónica en la UNAL, la automatización de procesos en estos sectores puede ser una respuesta para que los productores nacionales sean más competitivos ante la actual escasez de mano de obra requerida en los procesos de poscosecha.
Conoce más proyectos y contacta a los investigadores a través del sitio web de la División de Extensión sede Bogotá o mediante el correo deb_bog@unal.edu.co.
- Contenido elaborado por la Agencia de Noticias de la Universidad Nacional de Colombia. Consulta la noticia en este enlace.
- Foto de portada: Luis Palacios - Unimedios.
Contenido cortesía de:

Visita otros Ecosistemas
Estilo de vida y consumo
Agroindustria y alimentos
Industria, construcción y manufactura
Industrias creativas y culturales
Moda y confección
Turismo
Contenidos similares













Contenidos similares
-
Una alianza de:

